ME310 is a Stanford class focused on design and innovation. Students work on teams with a corporate partner to solve some sort of problem. They spend the first 2/3 of the year identifying the main problem and prototyping ideas while the last 1/3 is spend creating the final solution. For my project, we were partnered with Maersk Drilling who were looking for a way to improve the safety and efficiency of an offshore drilling rig. We created a beacon based tracking system and web application to make it easier for rig operators to find and track cargo on the rig.
Our solution, Oceanlog, is a beacon-based GPS tracking system that indicates in real time the location of every container on the rig through a web application. The beacons are attached to containers and are linked to a web application system that is accessible to users on the rig. Our solution also enables coordination across parties involved in planning cargo delivery to and return from offshore rigs.
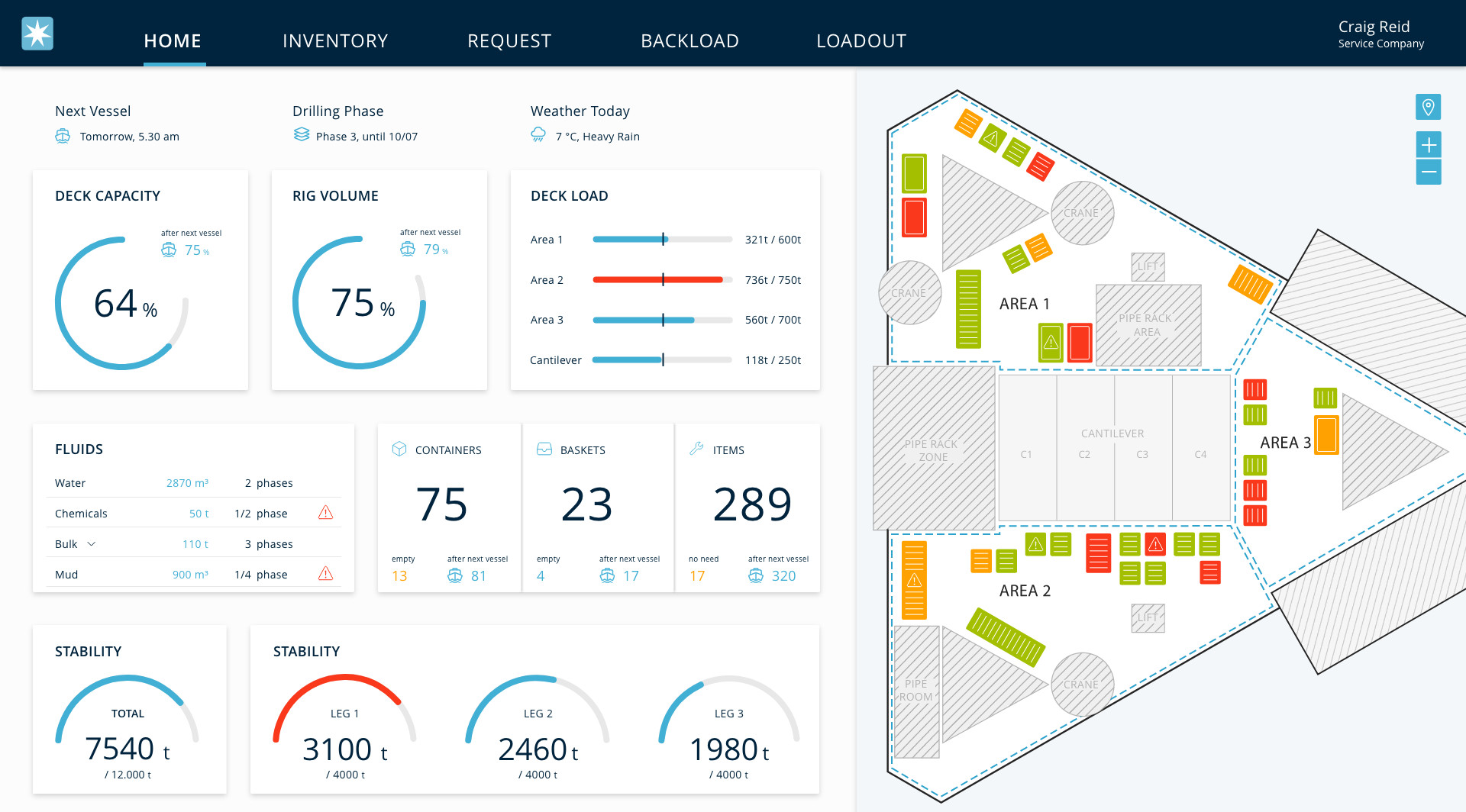
I designed the GPS beacons we used for this project. They are controlled by an ESP32 which reads data from a GPS module and sends it over MQTT/WiFi to an AWS server that connects to our Angular front end application. Due to the Covid-19 pandemic that required all of the work to be done remotely, I designed the beacons such that they did not required specialized parts or equipment and could be assembled by any of our teammates across the world.
![]()
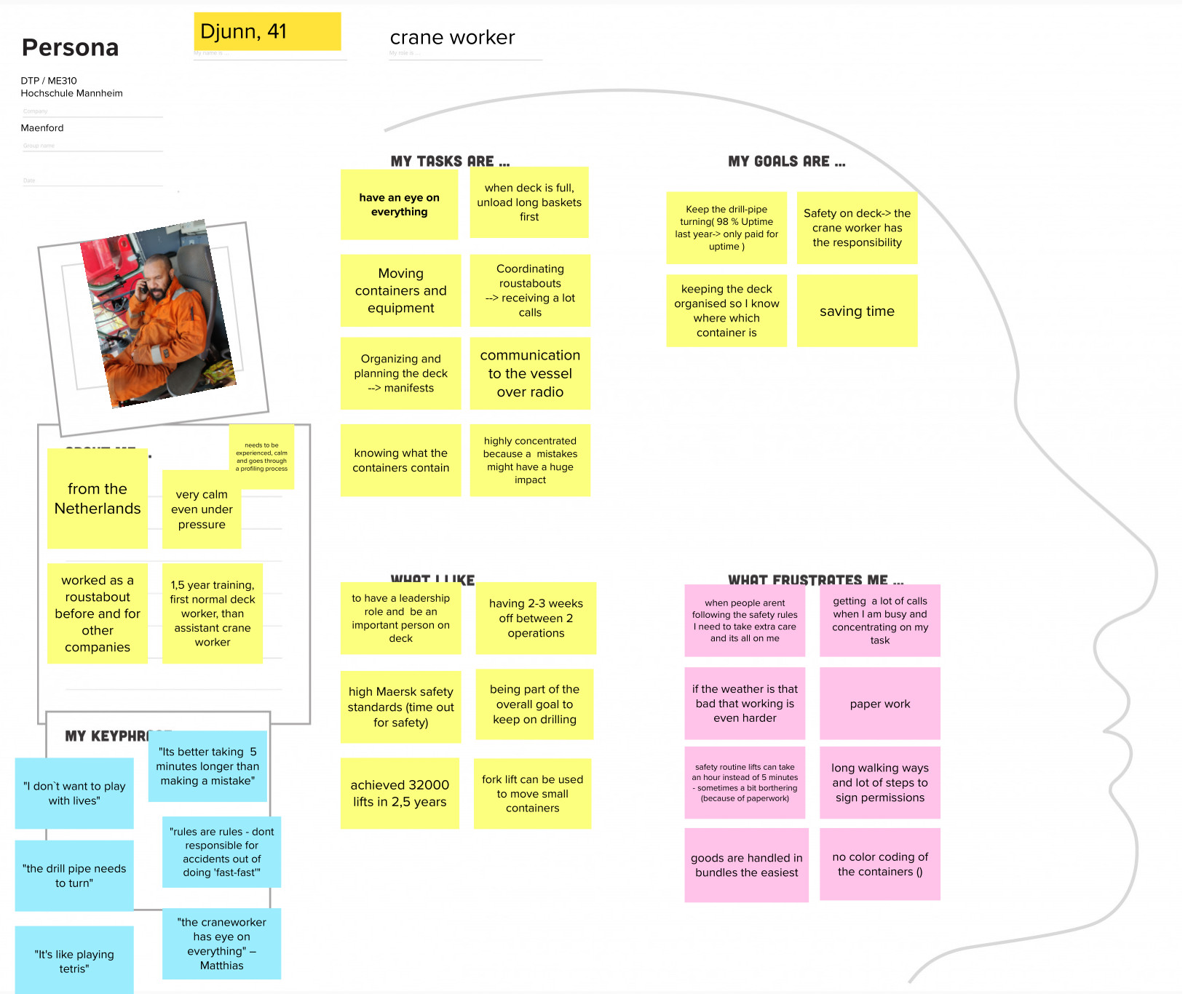
This solution was developed through user interviews with workers on the drilling rig and by creating prototypes to test ideas. In order to ensure we were creating a solution to a real problem, we had to create a thorough user persona. We also prototyped many of our ideas to understand how viable they might be and if they would solve problems our users were facing. Some of our most sophisticated prototypes in this space included collapsible containers and auto guiding crane hooks.
Auto guiding hook prototype
One very manual and dangerous operation on the drilling rig is latching and unlatching the hook of the crane from containers. This hook replaces that worker. It uses propellers to fly itself to the container latching point; the crane operator only needs to get itself close to it and the propellers handle the rest. A camera with computer vision is at the bottom of the hook and it uses closed loop control on the propellers to guide it to the final location. 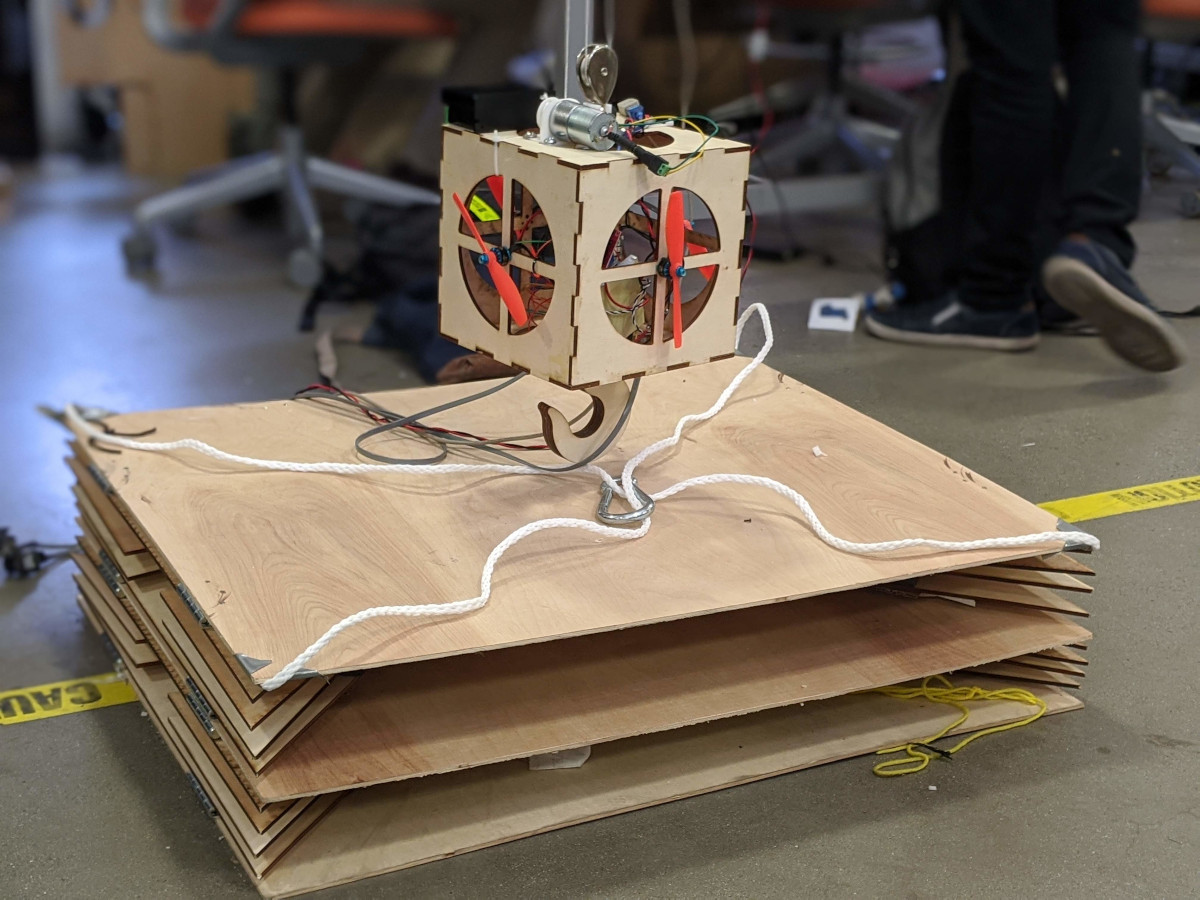
Collapsible container prototype
It is at 60% scale, made from plywood, and can collapse to 1/4 of its original size. We made this prototype since deck space is valuable on a rig and oftentimes some of this valuable space is taken up by empty containers that formally held consumables. We wanted to see if it was viable to collapse these containers after use and how a user might interact with them. 